
Quạt ly tâm, Quạt hướng trục
Cân bằng tĩnh và cân bằng động khác nhau như thế nào?

Th2
Cân bằng tĩnh và cân bằng động là hai khái niệm được sử dụng phổ biến trong các máy móc thiết bị có sự chuyển động quay. Hiểu được bản chất việc cân bằng này sẽ giúp ta giải quyết các vấn đề về rung động khi máy hoạt động.
1. Cân bằng tĩnh là gì?
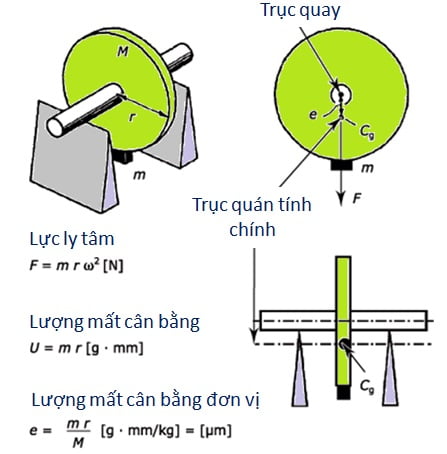
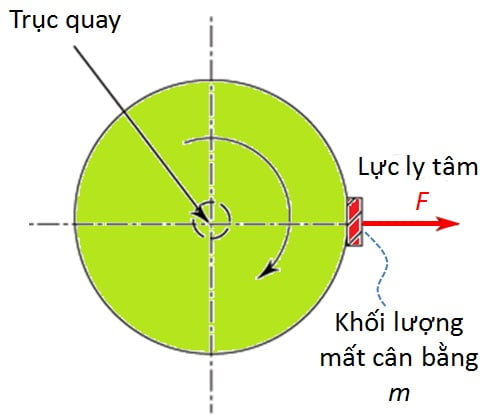
Cân bằng tĩnh là trạng thái cân bằng của vật quay xét tại thời điểm mà vật không có chuyển động quay. Đối với các chi tiết quay như cánh quạt, cánh bơm, rotor…thì nếu bị mất cân bằng tĩnh, tức là khi khối lượng phân bố không đều trọng tâm của vật sẽ đặt tại vị trí lệch khỏi trục quay(xác định trên một mặt phẳng quay).
Nếu bỏ qua ma sát của các gối đỡ hoặc ma sát này rất nhỏ thì khi bị mất cân bằng tĩnh, các cánh quạt, cánh bơm, rotor sẽ luôn chuyển động để trọng tâm của nó ở vị trí thấp nhất (nếu đặt nằm ngang).
Nếu vật chuyển động quay với tốc độ thấp, khối lượng vật quay lớn thì ta có thể chỉ cần cân bằng tĩnh là đạt yêu cầu khi vận hành. Nếu vật chuyển động quay ở tốc độ cao thì bắt buộc phải tiến hành cân bằng động để máy có thể hoạt động ổn định và an toàn.
2. Cân bằng động là gì?
Cân bằng động là trạng thái cân bằng của vật quay xét tại thời điểm mà vật có chuyển động quay. Các vật thể quay được xác định cân bằng trên ít nhất là 2 mặt phẳng quay (cân bằng tĩnh xét trên một mặt phẳng).
Thông thường khi vật thể quay, sẽ có nhiều tốc độ mà tại đó sẽ diễn ra sự cộng hưởng và gây rung động mạnh nhất cho máy. Do đó khi tiến hành cân bằng động, nếu yêu cầu về độ rung động thấp ta nên tiến hành cân bằng tại tốc độ gần với tốc độ làm việc nhất. Nếu các chi tiết quay làm việc ở nhiều tốc độ khác nhau, sau khi cân bằng động tại nhiều tốc độ khác nhau ta sẽ tiến hành ghi nhận các tốc độ mà gây mất rung động nhiều nhất và điều chỉnh tốc độ làm việc phù hợp.
3. Phương pháp cân bằng cho vật thể quay
Hiện tại lý thuyết tính toán về cân bằng tĩnh và cân bằng động khá đầy đủ, thường dùng ma trận hệ số ảnh hưởng để tính toán. Các thiết bị, phần mềm ngày càng hoàn thiện và đạt độ chính xác cao.
Có thể tham khảo các tiêu chuẩn, giáo trình về cân bằng động sau:
– ISO 20816:2022 Mechanical Vibration
– C.M.Harris, Allan G. Piersol (2002), Harris’ shock and Vibration Handbook (fifth edition), McGraw-Hill.
– Hatto Schneider (1991), Balancing Technology, Schenck
– J.S.Rao (1988), Rotor Dynamics, New York.
– M.J Goodwin (1989), Dynamics of Rotor – Bearing Systems, London.



Navis Group với đội ngũ chuyên gia trong nhiều lĩnh vực sẽ tư vấn các giải pháp tổng thể tốt nhất cho Quý khách hàng.



